Portolio of David Elkan-Gonzalez
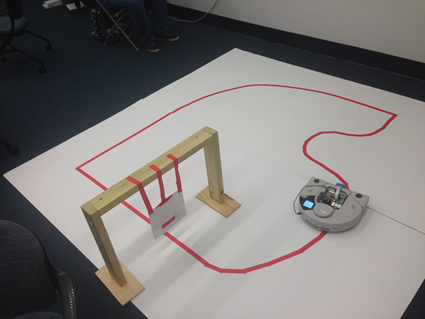
This Neato was programmed to perfectly follow the red line then stop when it reaches a stop sign. The stop sign is suspended from the wooden frame.
Neato Line Following
Using neatos equipped with cameras I formed a team with another student to compete in a class lin-following contest. In addition to following a line the neatos would stop appropriately when they detected a stop sign. Scores were assigned based on recording indicents of the robot failing to follow the line, how close to the stop sign the robot stopped, and how quickly the robot was able to complete the course.
The video on the top left demonstrates the functionality of our code. The neatos used a raspberry pi running ros, and a front-mounted camera to detect obstacles. Using OpenCV we used contour mapping and shape detection to identify the stop sign and lines as the neato drove. The completed code allowed the neato to drive at top speed while handling just about any turn we could throw at it. Programming is in ROS via Python
Team Size: 2
Project Duration: 2 weeks
Year Completed: Senior
Key Skills: ROS, Python, Computer Vision, Object Recognition, Robot Control, Path Planning